定位设备中所出现的误差可规划为两类:不(可预测误差)以及不精密(随机误差)。了解这些误差的源头以及重要性能够协助您制定一些策略以防止与纠正误差,同时也可使人们更加信赖系统的性能。以下为有关用于描述定位误差的重要规格的详情

图1:说明度与精密度之间的差异
分辨率
分辨率指的是在可要求的范围内对小距离改变的衡量。虽然分辨率在定位应用中是个重要特点,但却无法衡量度或精密度,因为分辨率是个计算值。分辨率的计算是依据控制器、电机以及机械结构组件的规格,而因为Zaber™装置使用备有微步进电机驱动器的步进电机,因此分辨率也可称为微步尺寸。虽然分辨率并无法衡量误差,但是若要取得准确且精密的移动则需要高分辨率。
度
在移动范围的任何两个点之间移动时,度规格将表明理想移动距离以及预期之内的实际移动距离之间的大偏移程度。度规格可受到几个误差源的影响,而移动距离越短,度则更高。
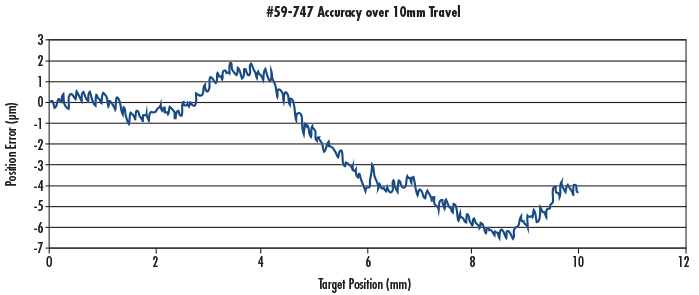
图2:150mm Zaber™平移台的度
可重复性
可重复性是定位装置的精密度与一致性的佳衡量。某物件往同一方向多次接触装置,而装置此后所展示的位置偏移就可确定可重复性。针对Zaber™的设备,可重复性少比度小一个数量级。
间隙
移动机械系统在移动方向中可能会留下细小缺口(或余隙)以避免过分限制的情况。在改变方向时,这些余隙将形成微小的空动(或游隙)并且需要被吸收。这也被称为系统内所呈现的间隙。
对于许多系统,要处理此不来源并非难事。其中一个方法是对关键位置的接触采取一致的方向。另一个方法是施加微弱的轴力,将调整台推向缺口的一侧。在垂直应用中,地心引力将会施加抵消间隙所需的力量。
版权所有 © 2024 江阴韵翔光电技术有限公司 备案号:苏ICP备16003332号-1 技术支持:化工仪器网 管理登陆 GoogleSitemap


