


Hexapod 运动控制器/驱动器
- 产品型号:
- 更新时间:2023-12-21
- 产品介绍:Hexapod 运动控制器/驱动器,专门与 Newport Hexapods 结合使用,能够控制其他两个单轴运动系统。虽然硬件与 Newport XPS 通用高性能运动控制器/驱动器相同,但 HXP-ELEC 预配置了特殊固件来控制 Hexapod 机构。为了简化编程以及集成过程而设计的固件功能。
- 厂商性质:代理商
- 在线留言
产品介绍
| 品牌 | Newport/美国 | 价格区间 | 面议 |
|---|---|---|---|
| 组件类别 | 光学元件 | 应用领域 | 医疗卫生,环保,化工,电子 |
Hexapod 运动控制器/驱动器

HXP-ELEC 是一种高性能运动控制器,专门与 Newport Hexapods 结合使用,能够控制其他两个单轴运动系统。虽然硬件与 Newport XPS 通用高性能运动控制器/驱动器相同,但 HXP-ELEC 预配置了特殊固件来控制 Hexapod 机构。为了简化编程以及集成过程而设计的固件功能。
Ø用于六足位移台定位器的控制器和驱动器
ØHXP+2 功能,可调用两个附加运动轴
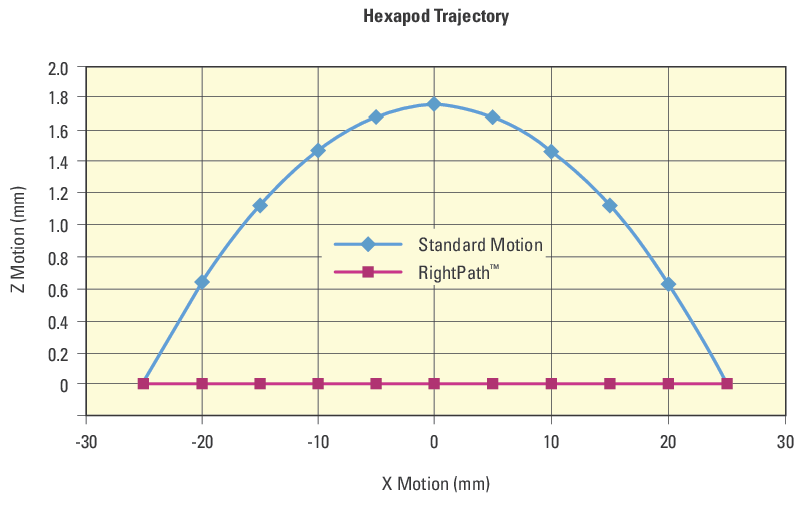
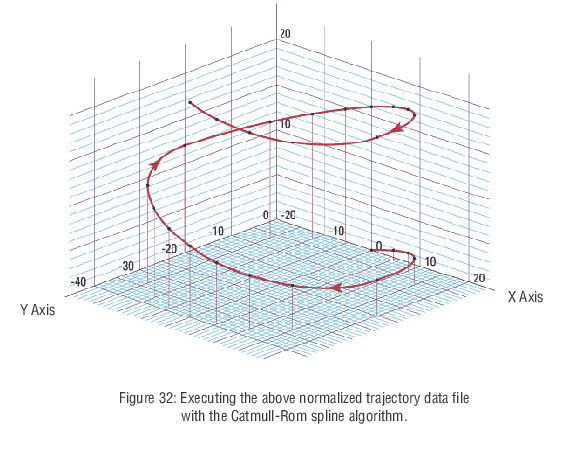
ØRightPathTM
轨迹控制,可实现恒定速度下的超低摆动
Hexapod 运动控制器/驱动器
产品型号
对比 | 型号 |
| HXP100-ELEC-D运动控制器,六角,HXP100-MECA |
| HXP1000-ELEC-D运动控制器,六角,HXP1000-MECA |
| HXP100HA-ELEC-D运动控制器,六角,HXP100HA-MECA |
| HXP100P-ELEC-D运动控制器,六角, HXP100P-MECA |
| HXP100PHA-ELEC-D运动控制器,六角,HXP100PHA-MECA |
| HXP100V6-ELEC-D运动控制器,六角, HXP100V6-MECA |
| HXP200-ELEC-D运动控制器,驱动器,用于 HXP200-MECA |
| HXP200S-ELEC-D运动控制器,驱动器,用于 HXP200S-MECA |
| HXP50-ELEC-D运动控制器,六角, HXP50-MECA |
| HXP50HA-ELEC-D运动控制器,六角,用于 HXP50HA-MECA |
| HXP50V6-ELEC-D运动控制器,六角,HXP50V6-MECA |











特征
RightPathTM轨迹控制 | |
| RightPathTM轨迹控制是一种固件功能, 可以恒定且可定义的速度沿着定义的轨迹、 线、弧或旋转扫描运动,同时保证摆动较小。 |
用于集成外部设备的输入和输出 | |
HXP-ELEC 共有 60 个数字 I/O 设备, 用于读取外部开关、控制阀或其他数字设备, 还具有 4 个模拟输出,可准确监视任何运动轴 (如位置、速度或加速度)。 为了在运动过程中与外部设备同步,控制器具有的&ldquo |
|
HXP+2 | |
| 升级 HXP-ELEC 控制器, 使之从六脚设备运行的六轴运动升级到由 一个六脚设备和另外两个电动轴运行的六轴运动。 通过在直线位移台的顶部安装六轴并联定位系统来扩展 X 轴行程, 或通过在转台的顶部安装六轴并联定位系统来扩展 Z 轴旋转范围。 自定义带两个附加运动轴的六脚设备。 |
实时处理和多任务处理 | |
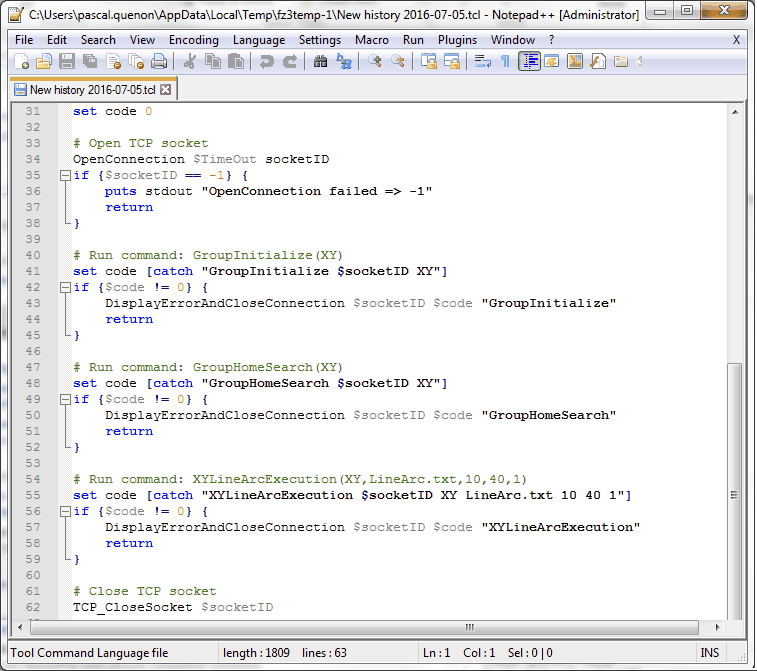
基于 QNX 实时操作系统和多任务处理功能, HXP-ELEC 能够使用 TCL 脚本执行用户生成的内部存储复杂应用程序。 运动处理器支持 TCL 程序执行,而不会对高优先级任务产生不利影响。 利用这种*的实时多任务处理功能, 控制器不仅能管理较复杂的运动要求, 而且还能作为一个强大的独立过程控制器, 以同时支持多个应用程序。 |
|
使用外部模拟设备的命令运动 | |
| HXP-ELEC 具有 4 通道 14 位的模拟—数字转换器, 可以使用 TCL 脚本与运动过程集成。 模拟输入可通过外部模拟输入进行转换, 以直接控制运动轴的位置或速度。 这对于精密对准或自动聚焦例程 (需要来自其他设备的实时反馈,例如功率计、 视觉系统或其他传感器)而言是至关重要。 除了较高的通信速度外,模拟—数字转换也在控制器内部进行, 因此不会增加主机或通信线路的处理负担。 因此,该功能可以改进流程开发和产量。 |
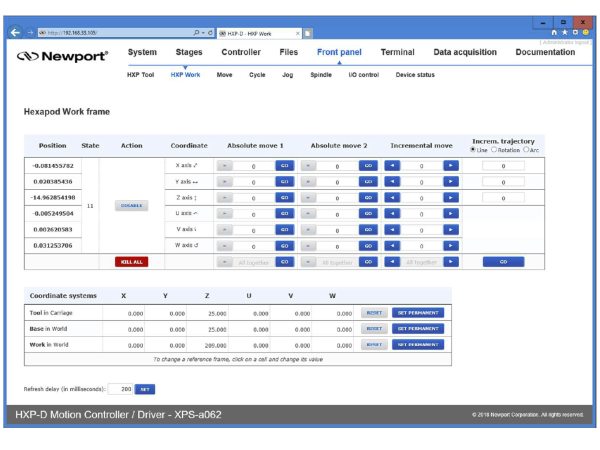
用户友好的GUI | |
HXP-ELEC为用户提供了方便, 用户友好的方式来访问控制器的较常用功能。 所有软件工具都实现为Web界面, 该界面独立于用户的操作系统, 并且不需要主机PC上的任何特定软件。 |
|


配件
对比 | 描述 |
| HXP-Joystick操纵杆控制器,HXP 系列六足位移台 |

